



































































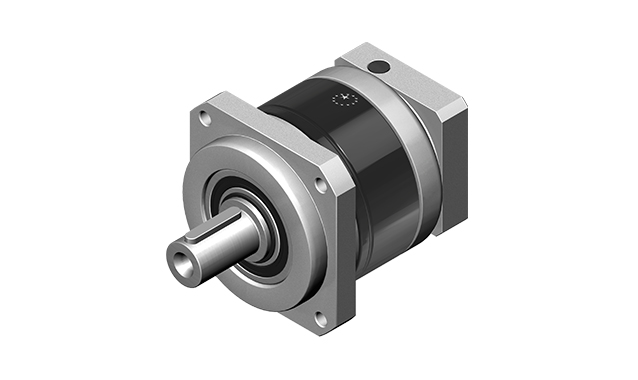








































伺服电机和步进电机具有相似的结构,并具有相同的基本工作原理。两种电机类型都包含一个带永磁体的转子和一个带有线圈绕组的定子......两者都是通过给定子绕组通电或施加直流电压来操作的。然后,这会导致转子移动。然而,这是伺服电机和步进电机之间的相似性结束的地方。

步进电机的驱动方法
步进电机有50到100个极,是两相装置。
相比之下,伺服电机有4到12极,是三相装置。
更重要的是,步进电机驱动器产生的正弦波的频率随速度而变化......但幅度是恒定的。

另一方面,伺服驱动器产生具有可变频率和幅度的正弦波 - 允许它们控制速度和扭矩。

步进电机的控制方法
传统的步进电机在接收到推进一定数量脉冲的命令时会移动,这些脉冲与距离相关。步进器被认为是开环系统,因为它们缺少反馈机制来验证是否已达到目标位置。伺服电机也会在接收到来自控制器的命令信号时移动。与步进电机系统的开环操作相比,伺服电机是闭环系统,内置编码器可连续地与控制器通信,进行任何必要的调整以确保达到目标位置。
在步进电机系统中,如果可用的电机转矩不足以克服负载,则电机将停止或跳过一个或多个脉冲,从而在所需位置和到达的实际位置之间产生差异。为避免这种情况,步进电机通常尺寸过大,以确保最坏情况负载转矩和电机可用转矩之间存在较大差距。但是可以选择超大电机。通过添加编码器并在闭环模式下运行,步进电机系统可以像伺服电机一样实现位置监控和控制。
在闭环模式下操作步进电机的最直接方法是比较基于步数应达到的理论位置,以及基于编码器反馈达到的实际位置。如果目标位置和实际位置之间存在差异,则控制器启动校正移动。
虽然上述方法是反应性的,但在完成移动后校正电机的位置,闭环步进器也可以连续监测位置步骤和编码器反馈(通常安装在负载上)之间的差异。通过连续反馈,可以通过增加脉冲速率,暂时增加电流或调整步进角来实时进行补偿。
在闭环模式下操作步进电机的第三种方法采用正弦换向。如果转子和定子磁场没有正确对齐,编码器会调整电机电流,使其与移动或保持负载所需的扭矩完全匹配。因为反馈用于通过操纵电动机电流来控制转矩,所以该模式有时被称为伺服控制。在伺服控制模式下,步进电机基本上就像一个高极数伺服电机,但没有传统步进电机所表现出的噪音和共振,提供更平稳的运动和更精确的控制。由于电流是动态的,而不是像传统步进电机那样恒定,因此很大程度上避免了电机加热的问题。
闭环步进电机消除了传统开环步进系统的许多缺点,使其性能与伺服电机相似。但伺服电机在需要高速,高速高扭矩或能够处理变化负载的应用中甚至优于闭环步进电机。


 浙公网备案33010802010418
浙公网备案33010802010418 